Back to Projects
Face Tracking Robot
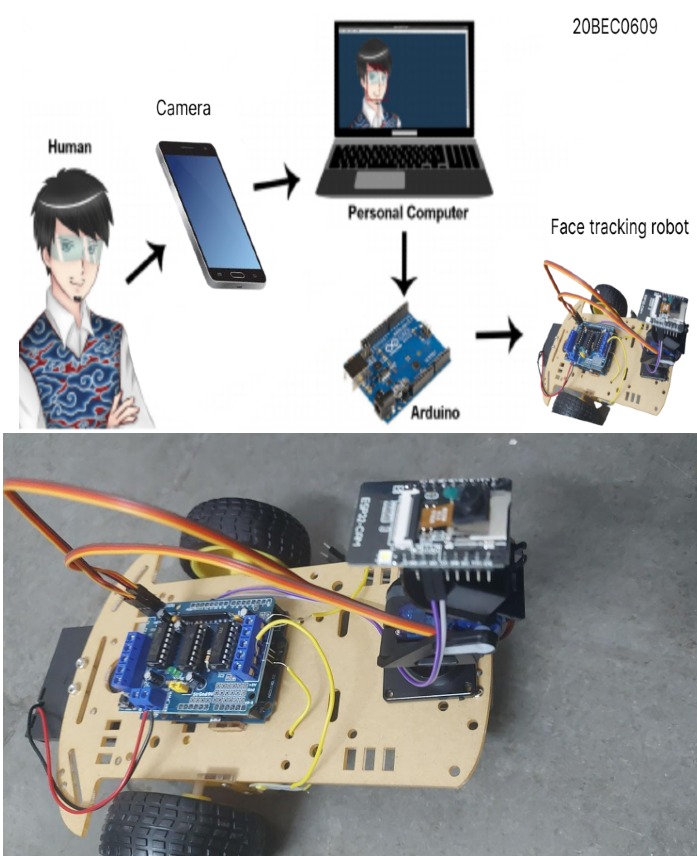
Computer Vision, Arduino, Robotics — Real-Time Face Detection and Person Following
📋 Project Overview
Implemented Python-based computer vision algorithms for real-time face detection and tracking, ensuring robust operation under dynamic lighting and motion conditions.
Built and integrated a 4-wheeled mobile base with microcontroller, enabling autonomous navigation and consistent person-following behavior. Demonstrated perception-to-control integration by synchronizing camera input with actuation commands, showcasing end-to-end robotic autonomy.
💡 Problem Statement
Building an autonomous face tracking system involves several challenges:
- Real-time Processing: Face detection and tracking must operate at video frame rates
- Robust Detection: Handling varying lighting conditions, angles, and occlusions
- Precise Control: Smooth and accurate pan-tilt movements to keep face centered
- Robot Navigation: Coordinating base movement with camera orientation
- System Integration: Seamless communication between vision, control, and actuation modules
- Latency Management: Minimizing delay between detection and robot response
⚡ Solution Approach
The system integrates multiple components:
- Face Detection: Haar cascades or deep learning-based face detection (MTCNN/YOLO)
- Face Tracking: Kalman filter for predictive tracking and smooth following
- Pan-Tilt Control: PID controllers for precise camera positioning
- Robot Base Control: Differential drive or omnidirectional control for base movement
- ROS2 Architecture: Modular nodes for vision, control, and actuation
- Coordinate Transformation: Converting image coordinates to robot frame
🛠️ Technical Implementation
Hardware Components
- Robot Base: 3-wheeled omnidirectional platform with encoders
- Camera System: USB camera or Raspberry Pi camera module
- Pan-Tilt Mechanism: Two servo motors for camera orientation
- Computing Unit: Raspberry Pi or onboard computer for processing
- Motor Controllers: PWM-based control for smooth movement
Software Architecture
- ROS2 Nodes: Modular architecture with separate nodes for each component
- Vision Node: OpenCV-based face detection and tracking
- Control Node: PID controllers for pan-tilt and base movement
- Actuation Node: Motor control and servo positioning
- Topic Communication: Camera images, face coordinates, and control commands
- TF2: Coordinate frame transformations between camera and robot base
Control Algorithms
- Face Detection: Haar cascades or deep learning models for robust detection
- Kalman Filtering: Predictive tracking to handle temporary occlusions
- PID Control: Proportional-Integral-Derivative controllers for smooth tracking
- Coordinate Mapping: Image pixel coordinates to pan-tilt angles
- Velocity Control: Smooth velocity commands for base movement
🏆 Key Achievements
- ● Real-time face tracking at 30 FPS
- ● Smooth and responsive pan-tilt movements
- ● Robust tracking under varying lighting conditions
- ● Successful integration of vision, control, and actuation
- ● Modular ROS2 architecture for easy extension
💡 Challenges Overcome
- ● Synchronizing multiple control loops (pan, tilt, base)
- ● Handling face detection failures and occlusions
- ● Calibrating camera-to-robot coordinate transformations
- ● Optimizing PID parameters for smooth tracking
- ● Managing computational resources for real-time processing
📚 Key Learnings
- ROS2 Development: Building modular robotic systems with ROS2
- Computer Vision: Real-time face detection and tracking techniques
- Control Systems: PID control implementation for robotic applications
- Robotic Integration: Combining perception, planning, and actuation
- Coordinate Systems: Understanding and managing multiple reference frames
- Real-time Systems: Optimizing for low-latency performance
🚀 Future Enhancements
- Multi-face tracking and person re-identification
- Deep learning-based face recognition for personalized interaction
- Autonomous navigation to follow a person
- Gesture recognition for human-robot interaction
- Integration with SLAM for mapping and navigation
- Voice commands for hands-free control
- Mobile app for remote monitoring and control
Skills Demonstrated
Robotics
ROS2
OpenCV
Computer Vision
Control Systems
PID Control
Face Detection
Kalman Filter
Python
C++
Embedded Systems
Sensor Integration
Real-time Systems
Motor Control